http://www.u-ca.net/
| ||||
1100×500 => 512×232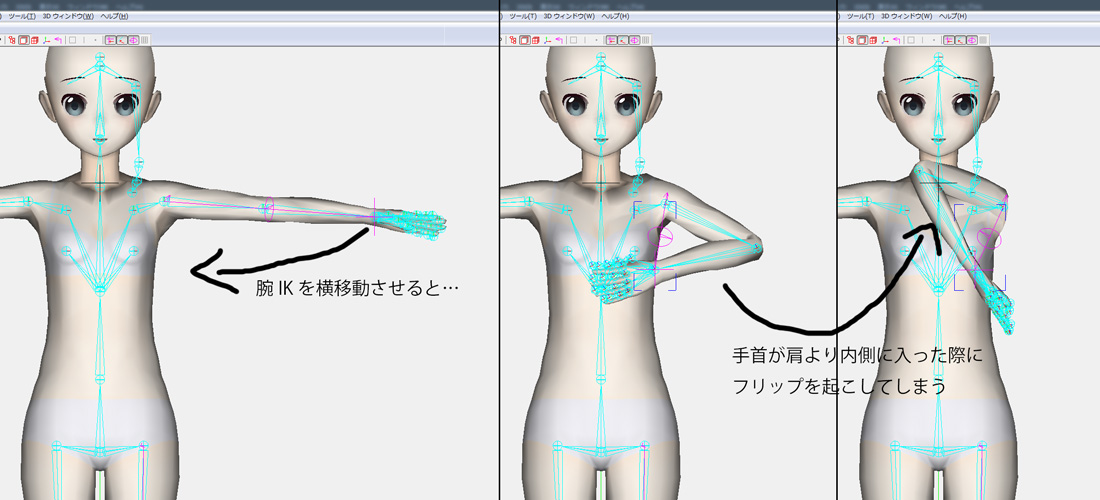 IK.jpg/147KB | ||||
http://www.mechastudio.net/
| ||||
1441×950 => 512×337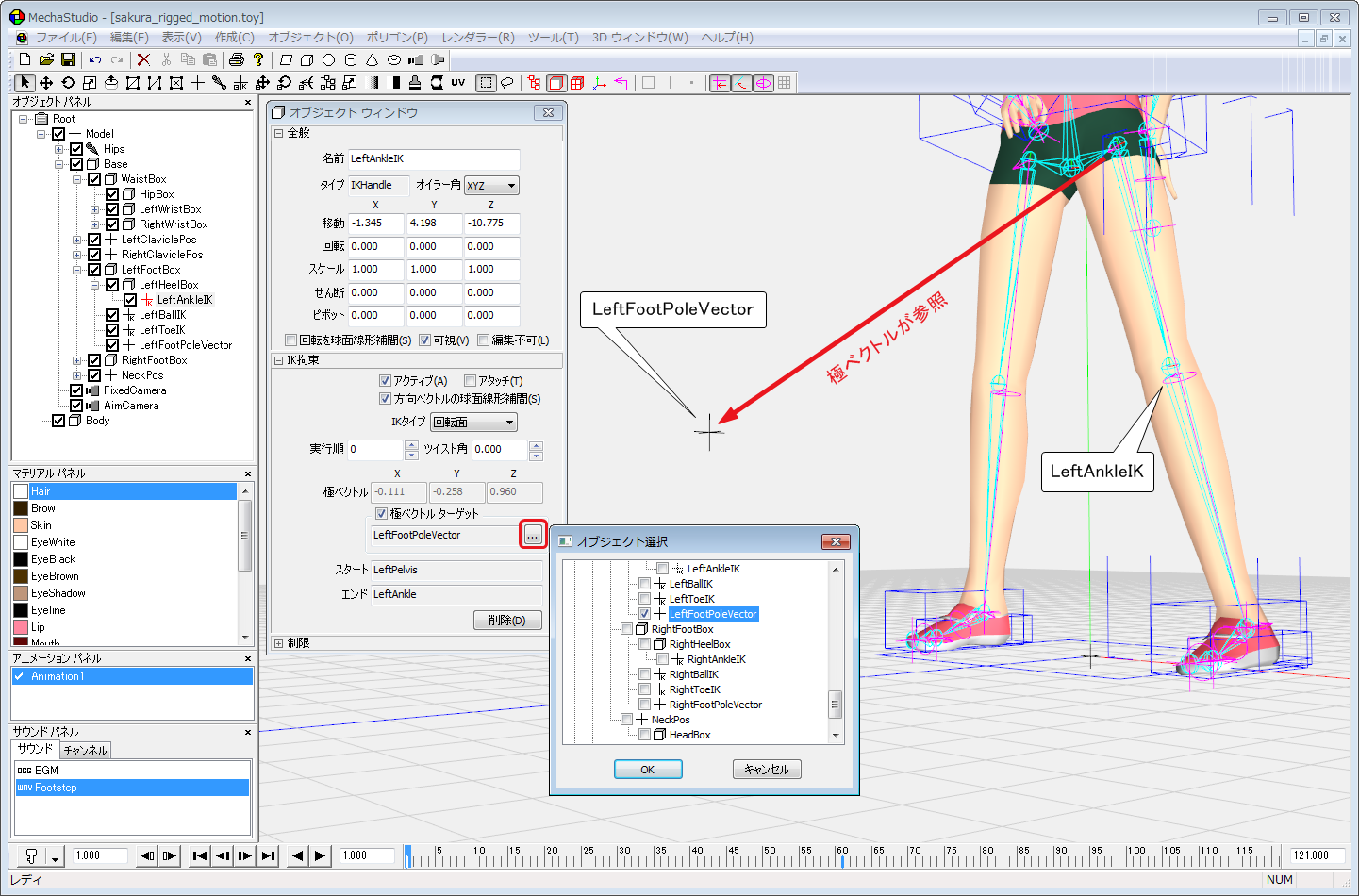 pole_vector_target.png/265KB | ||||
http://www.u-ca.net/
| ||||
n_Fix4.zip/200KB | ||||
http://www.mechastudio.net/
| ||||
http://www.mechastudio.net/
| ||||
716×464 => 512×331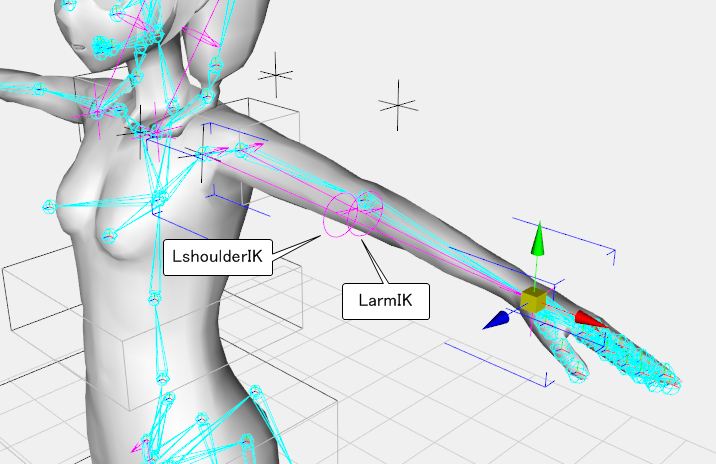 shoulder_rig.png/170KB | ||||
http://www.u-ca.net/
| ||||
http://www.u-ca.net/
| ||||
http://www.mechastudio.net/
対応済み | ||||
360×181 constraint_error_msg.png/7KB | ||||